Back to documentation
Choose Settings
You can choose various settings before camera tracking
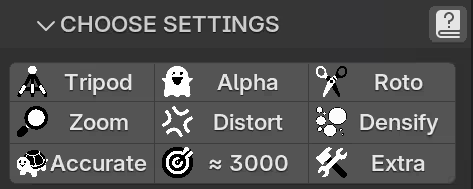
- Tripod - use the tripod solver mode (for pan/tilt shots)
- Alpha - use alphas of the image sequence (for masking)
- Roto - automatically roto foreground actor and generate alphas
- Zoom - solve for varying focal length (for zooming shots)
- Undistort - undistort the image using the calculated lens distortion
- Densify - generate a dense point cloud of the scene
- Accurate - use slower more precise trackers (CPU only)
- Features - target number of features to extract per image
- Extra - exposes advanced parameters for camera/tripod solving
Advanced Settings
These are the advanced parameters for standard tracking
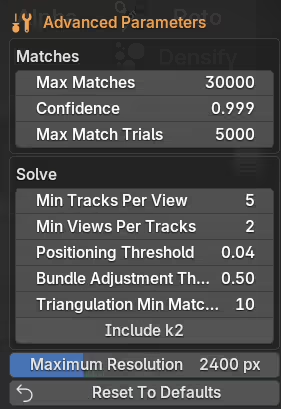
- Max Matches: Maximum number of matches per image pair
- Match Confidence: Threshold for RANSAC
- Max Match Trials: Maximum number of RANSAC trials during matching
- Min Tracks Per View: Minimum number of tracks needed for an image to be included
- Min Views Per Track: Minimum number of images needed for a track to be included
- Positioning Threshold: Error threshold for accepting a camera pose in solve
- Bundle Adjustment Threshold: Threshold to reject outliers in solve
- Triangulation Min Matches: Minimum number of matches/correspondences to triangulate a point
- Include k2: Include radial k2 intrinsic in distortion model.
- Maximum Resolution: Maximum image resolution to use internally
- Reset To Defaults: Resets all advanced parameters to recommended default values
Advanced Tripod Settings
These are the advanced parameters for tripod tracking
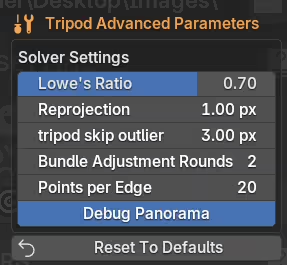
- Lowe's Ratio: Lowe's ratio test threshold for feature matching
- Reprojection: Reprojection error threshold in pixels
- Tripod Skip Outlier: Outlier rejection threshold in pixels for tripod solver
- Bundle Adjustment Rounds: Number of bundle adjustment iterations in solve
- Points per Edge: Number of points sampled per edge for solving
- Debug Panorama: Creates a panorama image to check alignment
- Reset To Defaults: Resets all advanced parameters to recommended default values